您好!歡迎訪問(wèn)上海育仰科教設(shè)備有限公司網(wǎng)站!
全國(guó)服務(wù)咨詢熱線:
15216837090
15216837090

 當(dāng)前位置:首頁(yè) > 產(chǎn)品中心 > > 機(jī)械創(chuàng)新實(shí)訓(xùn)設(shè)備 > YUY-DCY電動(dòng)輪系傳動(dòng)特性演示及效率測(cè)試實(shí)訓(xùn)設(shè)備
當(dāng)前位置:首頁(yè) > 產(chǎn)品中心 > > 機(jī)械創(chuàng)新實(shí)訓(xùn)設(shè)備 > YUY-DCY電動(dòng)輪系傳動(dòng)特性演示及效率測(cè)試實(shí)訓(xùn)設(shè)備

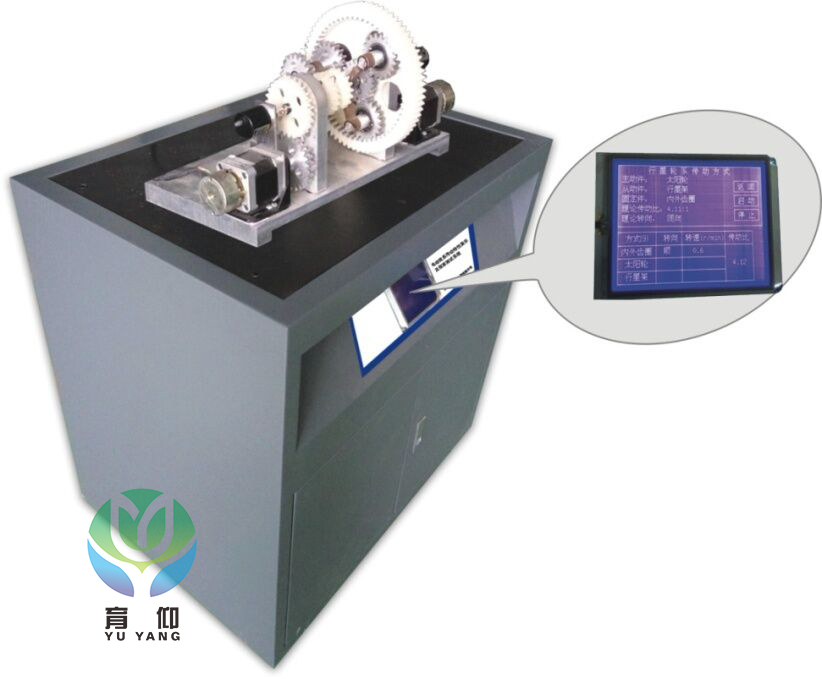
簡(jiǎn)要描述:電動(dòng)輪系傳動(dòng)特性演示及效率測(cè)試實(shí)訓(xùn)設(shè)備以復(fù)合輪系傳動(dòng)演示機(jī)構(gòu)為設(shè)計(jì)基礎(chǔ),在其上添加電氣設(shè)備,在擁有復(fù)合輪系傳動(dòng)演示機(jī)構(gòu)所有功能的基礎(chǔ)上,能夠自動(dòng)測(cè)試和顯示2K-H行星機(jī)構(gòu)(正號(hào)機(jī)構(gòu)、負(fù)號(hào)機(jī)構(gòu))的傳動(dòng)特性和傳遞效率。
產(chǎn)品分類
Product Category詳細(xì)介紹
| 品牌 | 育仰科教 | 應(yīng)用領(lǐng)域 | 文體,建材,交通,汽車,綜合 |
|---|
一、電動(dòng)輪系傳動(dòng)特性演示及效率測(cè)試實(shí)訓(xùn)設(shè)備技術(shù)領(lǐng)域
該套系統(tǒng)以復(fù)合輪系傳動(dòng)演示機(jī)構(gòu)為設(shè)計(jì)基礎(chǔ),在其上添加電氣設(shè)備,在擁有復(fù)合輪系傳動(dòng)演示機(jī)構(gòu)所有功能的基礎(chǔ)上,能夠自動(dòng)測(cè)試和顯示2K-H行星機(jī)構(gòu)(正號(hào)機(jī)構(gòu)、負(fù)號(hào)機(jī)構(gòu))的傳動(dòng)特性和傳遞效率。此外,能夠測(cè)試定軸輪系、2K-H行星機(jī)構(gòu)、差動(dòng)輪系、變齒機(jī)構(gòu)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)特性參數(shù)。
二、電動(dòng)輪系傳動(dòng)特性演示及效率測(cè)試實(shí)訓(xùn)設(shè)備研究背景及意義
機(jī)械原理、機(jī)械設(shè)計(jì)是大學(xué)機(jī)械、機(jī)電類專業(yè)的核心技術(shù)基礎(chǔ)課,對(duì)于培養(yǎng)學(xué)生的機(jī)械設(shè)計(jì)創(chuàng)新意識(shí)、分析及解決問(wèn)題的能力具有重要的作用。輪系結(jié)構(gòu)形式多樣,運(yùn)動(dòng)復(fù)雜,包括定軸輪系、行星輪系、差動(dòng)輪系、周轉(zhuǎn)輪系和復(fù)合輪系傳動(dòng)等。學(xué)生在學(xué)習(xí)時(shí)感覺(jué)齒輪構(gòu)件空間運(yùn)動(dòng)關(guān)系十分抽象難懂,教師在理論教學(xué)時(shí),多有輪系構(gòu)架運(yùn)動(dòng)理論闡釋分析和相關(guān)公式推導(dǎo)計(jì)算,鮮有齒輪系統(tǒng)、行星輪系、差動(dòng)輪系、周轉(zhuǎn)輪系和復(fù)合輪系有機(jī)結(jié)合的實(shí)驗(yàn)?zāi)M演示系統(tǒng),因而,非常不利于課堂理論教學(xué)的開(kāi)展和學(xué)生對(duì)于輪系理論知識(shí)的理解與掌握。 此外,由于輪系具有傳動(dòng)功率和傳動(dòng)比變化范圍大,設(shè)計(jì)容易,結(jié)構(gòu)緊湊等諸多優(yōu)點(diǎn),近年來(lái)發(fā)展和應(yīng)用極為廣泛,但是關(guān)于輪系運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)研究測(cè)試的相關(guān)實(shí)驗(yàn)設(shè)備卻極為少見(jiàn),阻礙了輪系的相關(guān)理論研究和實(shí)際產(chǎn)品的開(kāi)發(fā)。
三、系統(tǒng)方案設(shè)計(jì)
該測(cè)試系統(tǒng)能夠提供輪系傳動(dòng)特性演示和功率、效率測(cè)試,能夠直觀的展現(xiàn)行星輪系、差動(dòng)輪系的運(yùn)動(dòng)學(xué)特點(diǎn)以及在不同輸入狀態(tài)下輪系的傳動(dòng)效率和功率傳遞形式。 輪系測(cè)試系統(tǒng)的整體結(jié)構(gòu):輪系傳動(dòng)特性測(cè)試系統(tǒng)包括底板和分別設(shè)置在底板上的支座a和支座b,支座a中設(shè)置有太陽(yáng)輪軸,太陽(yáng)輪軸一端固定連接太陽(yáng)輪輸入齒輪、另一端連接內(nèi)外齒圈和太陽(yáng)輪,太陽(yáng)輪輸入齒輪與第二步進(jìn)電機(jī)連接,內(nèi)外齒圈與第三步進(jìn)電機(jī)連接,支座b中設(shè)置有行星架連接軸,行星架連接軸一端固定連接行星架輸入齒輪c、另一端依次固定行星架輸入齒輪b和行星架輸入齒輪a并與行星架連接,行星架輸入齒輪c與*步進(jìn)電機(jī)連接,行星架兩端固定有行星少齒齒輪和行星架齒輪,行星架兩端還分別通過(guò)行星架齒輪軸連接行星齒輪,2個(gè)行星齒輪同時(shí)與太陽(yáng)輪和內(nèi)外齒圈內(nèi)齒嚙合。 設(shè)計(jì)特點(diǎn):底板上設(shè)置有T型槽,支座a和支座b分別通過(guò)螺栓固定在T型槽中。 支座a與太陽(yáng)輪軸之間設(shè)置有支座軸承,太陽(yáng)輪軸與內(nèi)外齒圈通過(guò)齒圈軸承相連接,太陽(yáng)輪軸與太陽(yáng)輪為花鍵連接,太陽(yáng)輪輸入齒輪與太陽(yáng)輪軸之間設(shè)置有擋圈。太陽(yáng)輪輸入齒輪與第二步進(jìn)電機(jī)輸入齒輪嚙合,第二步進(jìn)電機(jī)輸入齒輪與第二步進(jìn)電機(jī)連接,第二步進(jìn)電機(jī)通過(guò)第二步進(jìn)電機(jī)支架固定在底板上;第二步進(jìn)電機(jī)輸入齒輪還與第二編碼器輸入齒輪嚙合,第二編碼器輸入齒輪與第二編碼器連接,第二編碼器通過(guò)第二編碼器支架固定在底板上。內(nèi)外齒圈外齒與第三步進(jìn)電機(jī)輸入齒輪嚙合,第三步進(jìn)電機(jī)輸入齒輪與第三步進(jìn)電機(jī)連接,第三步進(jìn)電機(jī)通過(guò)第三步進(jìn)電機(jī)支架固定在底板上;第三步進(jìn)電機(jī)輸入齒輪還與第三編碼器輸入齒輪嚙合,第三編碼器輸入齒輪與第三編碼器連接,第三編碼器通過(guò)第三編碼器支架固定在底板上。 支座b與行星架連接軸之間設(shè)置有軸承。 行星架輸入齒輪c與*步進(jìn)電機(jī)輸入齒輪嚙合,*步進(jìn)電機(jī)輸入齒輪與*步進(jìn)電機(jī)連接,*步進(jìn)電機(jī)通過(guò)*步進(jìn)電機(jī)支架固定在底板上;*步進(jìn)電機(jī)輸入齒輪還與*編碼器輸入齒輪嚙合,*編碼器輸入齒輪與*編碼器連接,*編碼器通過(guò)*編碼器支架固定在底板上。 行星少齒齒輪與行星架輸入齒輪b嚙合,行星架齒輪與行星架輸入齒輪a嚙合,行星少齒齒輪、行星架齒輪和行星架輸入齒輪c外分別設(shè)置有擋圈。 太陽(yáng)輪與支座a、內(nèi)外齒圈與支座a、行星架輸入齒輪c與支座b、行星少齒齒輪與行星架、行星架齒輪與行星架、行星齒輪與行星架齒輪軸間分別設(shè)置有銷軸。 底板上還固定有微控制器,微控制器分別與液晶顯示屏和穩(wěn)壓器連接,微控制器分別通過(guò)模數(shù)轉(zhuǎn)換器與*編碼器、第二編碼器和第三編碼器連接。 本機(jī)構(gòu)通過(guò)內(nèi)外齒圈將太陽(yáng)輪的驅(qū)動(dòng)和齒圈驅(qū)動(dòng)分為2個(gè),通過(guò)銷軸限制太陽(yáng)輪、內(nèi)外齒圈或行星架的周向轉(zhuǎn)動(dòng),即可實(shí)現(xiàn)不同的運(yùn)動(dòng)形式,行星齒輪和行星架安裝采用對(duì)稱布置方式,使得輪系運(yùn)動(dòng)更加平穩(wěn)可靠,有利于行星變齒機(jī)構(gòu)大傳動(dòng)比、高轉(zhuǎn)速機(jī)構(gòu)特性的實(shí)現(xiàn);采用步進(jìn)電機(jī)驅(qū)動(dòng),使得輪系可以高速運(yùn)轉(zhuǎn)、快速響應(yīng);采用編碼器采集輪系旋轉(zhuǎn)構(gòu)件轉(zhuǎn)速,轉(zhuǎn)速采集更加準(zhǔn)確可靠該演示系統(tǒng)控制簡(jiǎn)單,齒輪定位可靠,精度高,振動(dòng)小,操作方便,加工成本低廉,空間尺寸合理,結(jié)構(gòu)小巧,適合大量造并推廣應(yīng)用。
四、系統(tǒng)功能
1、該系統(tǒng)具有復(fù)合輪系傳動(dòng)演示機(jī)構(gòu)的所有功能,能夠?qū)崿F(xiàn)輪系的15種傳動(dòng)形式。
2、行星架、太陽(yáng)輪、內(nèi)外齒圈的速度直接、清晰的顯示在液晶顯示屏上,而且在不同輪系轉(zhuǎn)化調(diào)節(jié)參數(shù)過(guò)程中,各操作過(guò)程的各項(xiàng)數(shù)據(jù)實(shí)時(shí)、動(dòng)態(tài)顯示與理論傳動(dòng)比形成對(duì)比。
3、整體尺寸及結(jié)構(gòu)布局設(shè)計(jì)合理,加工成本低廉,結(jié)構(gòu)小巧,并且能夠?qū)崿F(xiàn)多種輪系的運(yùn)動(dòng),對(duì)于加深學(xué)生理論的理解和提高動(dòng)手能力具有很高的實(shí)用價(jià)值,適合大量制造并推廣應(yīng)用。
4、若將編碼器換成扭矩傳感器,可以進(jìn)行輪系傳動(dòng)效率、傳動(dòng)功率測(cè)試。可以測(cè)試不同輸入形式下輪系的功率分匯流形式及其效率,進(jìn)行相關(guān)輪系傳動(dòng)機(jī)理的科學(xué)研究。
五、實(shí)驗(yàn)項(xiàng)目(可實(shí)驗(yàn)15種、下面舉例10種)
1、行星輪系(帶變齒機(jī)構(gòu))的傳輸方式一固定件為雙聯(lián)齒輪,雙聯(lián)齒輪兩齒數(shù)相差1個(gè),分別為=19,=18,在行星架驅(qū)動(dòng)軸上可做軸向移動(dòng),將行星架,太陽(yáng)輪,內(nèi)外齒圈中其中的任意一個(gè)部件作為輸入端,另外兩個(gè)作為輸出端,此時(shí)展示的是變齒機(jī)構(gòu)的輸入輸出。
2、行星輪系(帶變齒機(jī)構(gòu))的傳輸方式二雙聯(lián)齒輪固定,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機(jī)構(gòu)支座和雙聯(lián)齒輪連接),行星架輸入,太陽(yáng)輪輸出。將手柄安裝在行星架驅(qū)動(dòng)軸上,由手柄驅(qū)動(dòng)行星架驅(qū)動(dòng)軸,使行星架為輸入端,太陽(yáng)輪作為輸出端,傳感器將行星架和太陽(yáng)輪的轉(zhuǎn)過(guò)的圈數(shù)顯示出來(lái),即可得到相應(yīng)的傳動(dòng)比參數(shù)。
3、行星輪系(帶變齒機(jī)構(gòu))的傳輸方式三雙聯(lián)齒輪固定,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機(jī)構(gòu)支座和雙聯(lián)齒輪連接),行星架輸入,太陽(yáng)輪輸出。具體實(shí)施方式同輪系輸出方式7。
4、行星輪系(帶變齒機(jī)構(gòu))的傳輸方式四雙聯(lián)齒輪固定,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機(jī)構(gòu)支座和雙聯(lián)齒輪連接),齒圈輸入,行星架輸出。將手柄安裝在內(nèi)外齒圈驅(qū)動(dòng)齒輪軸上,由手柄驅(qū)動(dòng)內(nèi)外齒圈驅(qū)動(dòng)齒輪,帶動(dòng)其他的齒輪轉(zhuǎn)動(dòng),使內(nèi)外齒圈作為輸入端,此時(shí)行星架作為輸出端,傳感器將內(nèi)外齒圈和行星架的轉(zhuǎn)過(guò)的圈數(shù)分別測(cè)出由計(jì)數(shù)器顯示出來(lái),即可得到相應(yīng)的傳動(dòng)比參數(shù)。
5、行星輪系(帶變齒機(jī)構(gòu))的傳輸方式五雙聯(lián)齒輪固定,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機(jī)構(gòu)支座和雙聯(lián)齒輪連接),齒圈輸入,行星架輸出。具體實(shí)施方式同輪系輸出方式9。
6、行星輪系(帶變齒機(jī)構(gòu))的傳輸方式六雙聯(lián)齒輪固定,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機(jī)構(gòu)支座和雙聯(lián)齒輪連接),行星架輸入,齒圈輸出。將手柄安裝在行星架驅(qū)動(dòng)軸上,由手柄驅(qū)動(dòng)變齒機(jī)構(gòu)齒輪軸,使行星架轉(zhuǎn)動(dòng),帶動(dòng)其他的齒輪轉(zhuǎn)動(dòng),將行星架作為輸入端,內(nèi)外齒圈作為輸出端,傳感器將內(nèi)外齒圈和行星架的轉(zhuǎn)過(guò)的圈數(shù)分別顯示出來(lái),即可得到相應(yīng)的傳動(dòng)比參數(shù)。
7、行星輪系(帶變齒機(jī)構(gòu))的傳輸方式七雙聯(lián)齒輪固定,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機(jī)構(gòu)支座和雙聯(lián)齒輪連接),行星架輸入,齒圈輸出。具體實(shí)施方式同輸出方式11。 8、差動(dòng)輪系的輸入輸出方式八讓機(jī)構(gòu)中的所有部件都處于自由狀態(tài),此時(shí)無(wú)固定件,當(dāng)同時(shí)任意選擇其中的2個(gè)端口作為輸入口,另一個(gè)為輸出端口,則此時(shí)展示的為差動(dòng)輸入。
9、差動(dòng)輪系的輸入輸出方式九無(wú)固定件,選擇太陽(yáng)輪和齒圈為輸入端,兩輸入端轉(zhuǎn)向可相同或者反向,行星架作為輸出端,傳感器將其三者轉(zhuǎn)過(guò)的圈數(shù)顯示出來(lái),即可得到其相應(yīng)的傳動(dòng)比關(guān)系。
10、差動(dòng)輪系的輸入輸出方式十無(wú)固定件,選擇太陽(yáng)輪和行星架為輸入端,兩輸入端轉(zhuǎn)向可相同或者反向,內(nèi)外齒圈作為輸出端,傳感器將其三者轉(zhuǎn)過(guò)的圈數(shù)顯示出來(lái),即可得到其相應(yīng)的傳動(dòng)比關(guān)系。
六、主要參數(shù):
1、輸入電壓:AC 220±7%50HZ
2、步進(jìn)電機(jī):3臺(tái)編碼器:3臺(tái)液晶顯示屏:1臺(tái)
3、外形尺寸:長(zhǎng)780*寬550*高1100
產(chǎn)品咨詢

電話
微信掃一掃